روبوٽ ويلڊنگ جو ويلڊنگ اثر ڪيترن ئي پهلوئن کان متاثر ٿئي ٿو. ڪيترائي گراهڪ ويلڊنگ روبوٽس استعمال ڪرڻ ۾ ماهر ٿيڻ کان اڳ گهٽ يا گهٽ ڪجهه مسئلن کي منهن ڏيندا. بنيادي طور تي، اهي مسئلا غلط آپريشن يا غلط روبوٽ سيٽنگن جي ڪري ٿين ٿا، ۽ انهن کي مناسب ترتيبن سان حل ڪري سگهجي ٿو. اڳيون، ايڊيٽر توهان کي ڪجهه مسئلن جو جائزو وٺڻ لاءِ وٺي ويندو جيڪي اڪثر ڪري يونهو ويلڊنگ روبوٽس ۽ لاڳاپيل حلن جي استعمال ۾ ٿينديون آهن.
1. ويلڊنگ دوران ناڪام آرڪ شروع ٿيڻ
1. آرڪ اڃا شروع نه ٿيو آهي.
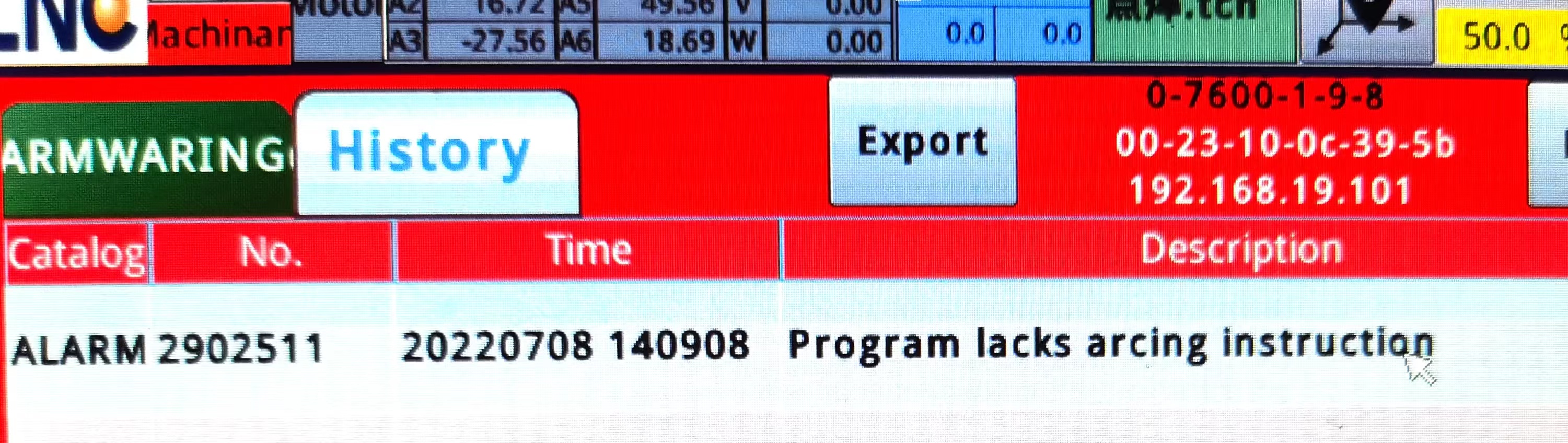
سبب: ايڊٽ ٿيل پروگرام ۾ آرڪ اينڊنگ ڪمانڊ تي عمل ڪرڻ کان اڳ ڪو به لاڳاپيل آرڪ شروعاتي ڪمانڊ ناهي.
پروسيسنگ جو طريقو: چيڪ ڪريو ته هڪ وڌيڪ آرڪ اينڊنگ ڪمانڊ شامل ڪرڻ گهرجي يا هڪ گهٽ آرڪ شروعاتي ڪمانڊ
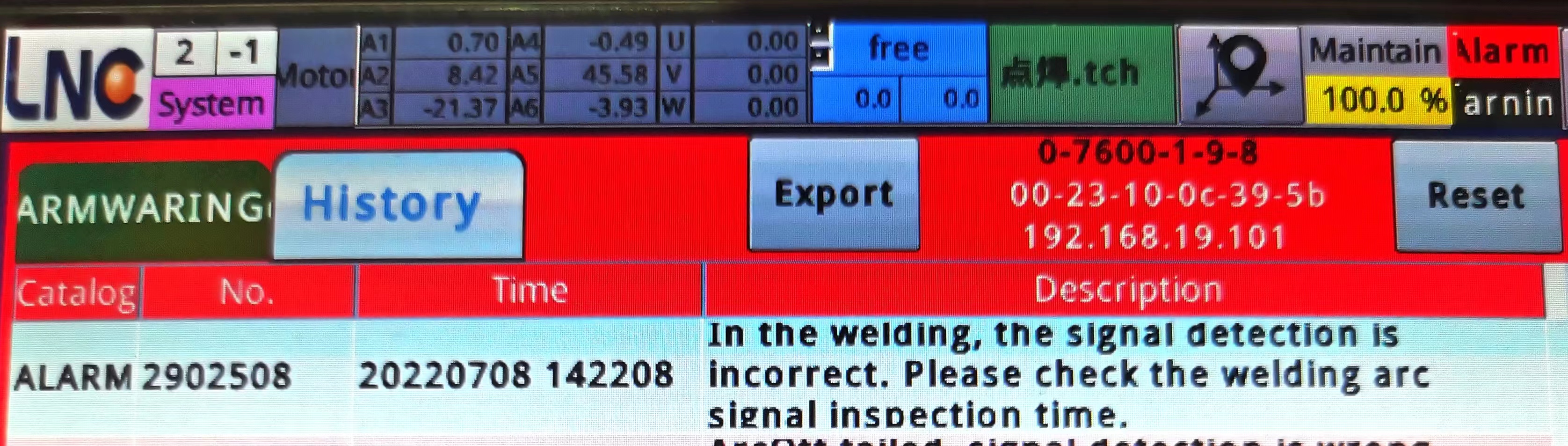
2. آرڪ شروع ڪرڻ ۾ ناڪام ٿيو، سگنل جي ڳولا غلط آهي.
طريقو:
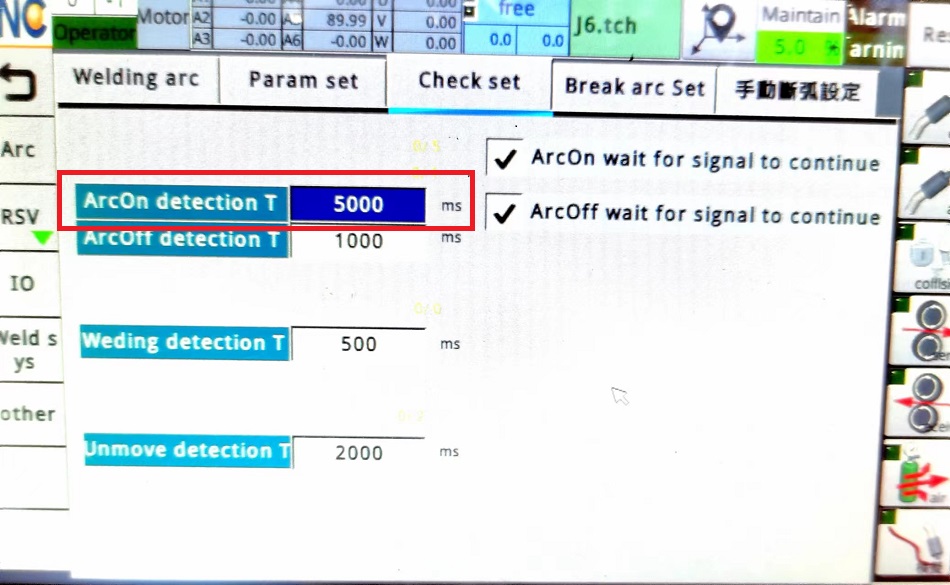
1) پيرا ميٽر پيج تي ويلڊنگ جي رڪاوٽ جي وقت جي سيٽنگ چيڪ ڪريو. عام طور تي، وقت کي 5000ms تي مقرر ڪرڻ مناسب آهي.
2) چيڪ ڪريو ته ڇا ويلڊنگ مشين سگنل ڪاميابي سان سسٽم ڏانهن منتقل ٿيو آهي
3) چيڪ ڪريو ته ڇا ورڪ پيس گرائونڊ ٿيل آهي
3. آرڪ فرائيڊ وائر
سبب:
1) ڪرنٽ ۽ وولٽيج ۾ بي ترتيبي
پروسيسنگ جو طريقو: اسان کي ورڪ پيس ۽ ويلڊنگ مشين جي اصل ٿلهي جي مطابق مناسب ڪرنٽ ۽ وولٽيج مقرر ڪرڻ جي ضرورت آهي.
2) ويلڊنگ تار جي ڊيگهه تمام گهڻي آهي
علاج جو طريقو: عام طور تي، ويلڊنگ تار جي ڊيگهه ويلڊنگ تار جي قطر کان 10 کان 15 ڀيرا وڌيڪ هوندي آهي، ۽ ويلڊنگ تار جي مناسب ڊيگهه ويلڊنگ تار جي قطر جي مطابق چونڊي ويندي آهي.

تمام گهٽ ڪرنٽ اڻ برابر ويلڊز جو سبب بڻجي ٿو.

عام ڪرنٽ ۽ وولٽيج، خوبصورت ۽ مضبوط ويلڊ

ويلڊنگ ٽارچ جو آخر تار کي گول ڪندو.

عام ويلڊنگ کان پوءِ ويلڊنگ ٽارچ اينڊ وائر سٺي حالت ۾ آهي.
4. خودڪار آرڪ بجھائڻ جو رجحان آرسنگ کان پوءِ ٿئي ٿو
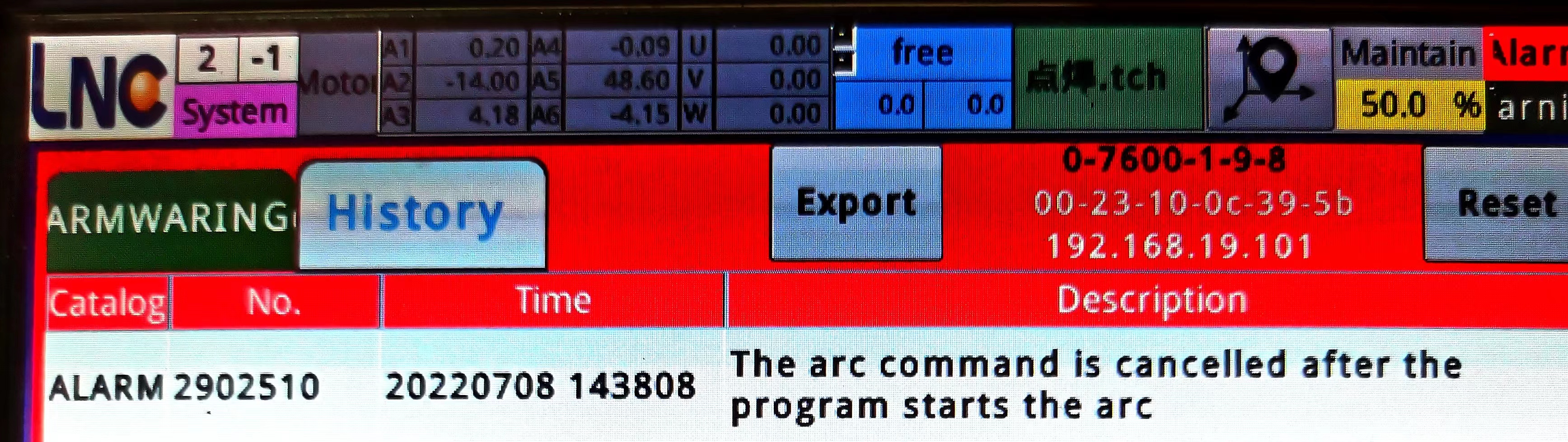
حل: چيڪ ڪريو ته ڇا پيرا ميٽر ٽائيم جي حرڪت واري وقت جي سيٽنگ ۾ ڪو مسئلو آهي، ۽ چيڪ ڪريو ته ڇا ويلڊنگ ٽارچ منتقل ٿي وئي آهي.
2. ويلڊنگ دوران آرڪ بريڪ ٿئي ٿو
سبب:
1. جيڪڏهن ويلڊنگ تار ورڪ پيس کي نه ڇُهي، ته آرڪ بريڪنگ الارم شروع ٿي ويندو.
علاج جو طريقو: ويلڊنگ تار ۽ ورڪ پيس جي پوزيشن کي ٻيهر ترتيب ڏيو، ته جيئن ويلڊنگ تار ويلڊنگ جي عمل دوران ورڪ پيس سان مڪمل طور تي رابطو ڪري. (پر اهو ورڪ پيس جي تمام ويجهو نه هجڻ گهرجي، اهو ورڪ پيس ذريعي ويلڊنگ جو سبب بڻجي سگهي ٿو)
2. غير معقول ويلڊنگ رستو ٽڪراءَ جي ڪري بندوق جو سر پاڻمرادو اڀري ٿو.
حل: ويلڊنگ جو رستو ري سيٽ ڪريو
3. ويلڊنگ مشين جا مثبت ۽ منفي تار خراب رابطي ۾ آهن.
علاج جو طريقو: مثبت ۽ منفي تارن جي وائرنگ جي حالت چيڪ ڪريو
3. ويلڊنگ کان پوءِ آرڪ اينڊنگ جي ناڪامي جا سبب
1. آرڪ ناڪامي، سگنل ڳولڻ جي غلطي
سبب: ويلڊنگ مشين کي روبوٽ کان سگنل نه مليو، جنهن جي ڪري روبوٽ آرڪ بند ڪرڻ ۾ ناڪام ٿيو.
طريقو:
(1) چيڪ ڪريو ته ڇا سيٽنگ پيرا ميٽر مناسب آهن
(2) IO سگنل چيڪ ڪريو، ۽ چيڪ ڪريو ته ڇا ختم ٿيندڙ پوائنٽ I جو سگنل غير معمولي آهي. جيڪڏهن I پوائنٽ سگنل آن ڏيکاريندو رهي ٿو.
(3) چيڪ ڪريو ته ڇا لائن ۾ شارٽ سرڪٽ آهي ۽ ڇا زميني تار غير معمولي طور تي ڳنڍيل آهي
2. آرڪ اسٽرائڪ کان پوءِ ڪو به آرڪ اسٽاپ ڪمانڊ مقرر نه ڪيو ويو آهي.

سبب: جڏهن هي الارم ٽيچ پينڊنٽ تي ٿئي ٿو، چيڪ ڪريو ته ڇا توهان آرڪ اينڊنگ ڪمانڊ شامل ڪرڻ وساري ڇڏيو آهي.
پروسيسنگ جو طريقو: پروگرام ۾ آرڪ شروعاتي ڪمانڊ کان پوءِ آرڪ اينڊنگ ڪمانڊ شامل ڪريو
هي مسئلو خاص طور تي ويلڊنگ جي عمل دوران يونهو ويلڊنگ روبوٽ جي آرڪ-شروع، آرڪ-بريڪنگ ۽ آرڪ-اينڊنگ سان لاڳاپيل مسئلن کي متعارف ڪرائي ٿو. جيڪڏهن استعمال ڪندڙ استعمال دوران اهڙين مسئلن کي منهن ڏين ٿا، ته اهي حلن جو حوالو ڏئي سگهن ٿا. جيڪڏهن اهي حل نه ٿي سگهن، مهرباني ڪري وقت تي يونهو ٽيڪنيشنن کان مدد وٺو.
جيڪڏهن توهان يونهو روبوٽ جا وڌيڪ عام مسئلا ۽ حل ڄاڻڻ چاهيو ٿا، ته مهرباني ڪري يونهو روبوٽ جي سرڪاري اڪائونٽ تي ڌيان ڏيو.
يون هوا ويلڊنگ روبوٽ هڪ خودڪار روبوٽ آهي جيڪو ملٽي فنڪشنل ويلڊنگ کي ضم ڪري ٿو جهڙوڪ گيس شيلڊ ويلڊنگ، آرگن آرڪ ويلڊنگ، پلازما ڪٽنگ، ۽ ليزر ويلڊنگ. ان ۾ اعليٰ لچڪ، مضبوط موافقت، موثر ويلڊنگ ڪارڪردگي ۽ مستحڪم ويلڊنگ معيار آهي، ۽ مختلف شعبن ۾ وڏي پيماني تي استعمال ڪري سگهجي ٿو. جهڙوڪ مشينري جي پيداوار، آٽو موبائيل جي پيداوار، درست اليڪٽرانڪس ۽ ڪوئلي جي مائننگ ۽ ٻيا شعبا.
پوسٽ جو وقت: جولاءِ 15-2022



