صنعتي پيداوار معاشي ۽ سماجي ترقي کي فروغ ڏيڻ لاءِ هڪ اهم ڪڙي آهي. هن وقت، خودڪار ويلڊنگ سامان تي تحقيق وڌيڪ ڳنڍجي رهي آهي ۽ ڪنڪريٽ ٿي رهي آهي، جيڪا ان کي مختلف قسمن جي ويلڊنگ ڍانچي جي پيداوار ۾ وڏي پيماني تي استعمال ڪري ٿي.
خودڪار ويلڊنگ جي عمل ۾، ويلڊنگ اسيمبلي جي فرق جي غلطي جو ذهين ۽ ڊجيٽل معقول ڪنٽرول هڪ خاص حد تائين، انهي بنياد تي، ورڪ پيس جي پوزيشن جي فرق، ورڪ پيس جوائنٽ انحراف ۽ ٻين عنصرن تي پڻ غور ڪيو وڃي ٿو. تنهن ڪري، ليزر ويلڊنگ سيم ٽريڪنگ ٽيڪنالاجي ويلڊنگ جي عمل ۾ اهم ڪردار ادا ڪري ٿي.
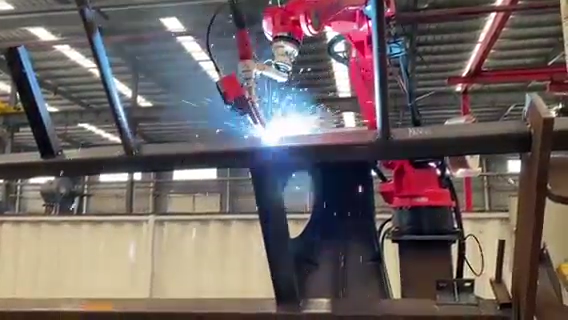
سيمينٽ ٽينڪ ڪار ڪار بيس ويلڊنگ ست محور زمين جو مدار اٺ محور گردش ليزر ويلڊنگ سان
- ورڪ پيس جي پوزيشن تمام گهڻي مختلف هوندي آهي
- ورڪ پيس ڪنيڪشن تي انحراف موجود آهي
-ويلڊنگ جي اعليٰ درستگي جي ضرورت آهي
-خراب ويلڊنگ ماحول ۽ دونھون
هن صورت ۾، يوهارٽ ذهين روبوٽ HY1006A-145 ليزر ويلڊنگ سيم ٽريڪنگ سسٽم سان ويلڊنگ لاءِ استعمال ڪيو ويندو آهي، جنهن ۾ اعليٰ لچڪ، استحڪام ۽ اعتبار آهي.
هر ويلڊنگ کان اڳ، سامان پهريان ويلڊنگ سيم جي ڪوآرڊينيٽ کي ويلڊنگ سيم جي جڳھ ذريعي اسڪين ۽ رڪارڊ ڪري ٿو، ۽ پوءِ اندروني الگورتھم ذريعي ڪوآرڊينيٽ آفسيٽ جو حساب لڳائي ٿو ۽ ريفرنس ڪوآرڊينيٽ پيرا ميٽرز کي اصل وقت ۾ رکي ٿو ته جيئن وقت ۾ اصل انحراف کي درست ڪري سگهجي، ته جيئن ويلڊنگ کان پوءِ پراڊڪٽ جي سيلنگ ۽ سالميت کي يقيني بڻائي سگهجي.
"چار نقطا چونڪ" طريقو
جيئن سڀني کي خبر آهي، ٻه نقطا هڪ سڌي لڪير جو تعين ڪن ٿا، پر ورڪ پيس اسيمبلي زاويه ٺاهيندي، روايتي الگورتھم ان جي پوزيشن جو تعين ڪرڻ جي قابل ناهي، ان لاءِ چار وڳي "انٽرسيڪشن" جو طريقو استعمال ڪرڻ جي ضرورت آهي، ٻه لائينون هڪ ٻئي کي ملائيندي چوراهي واري نقطي کي پيدا ڪن ٿيون، خاص جو الگورتھم ڄاڻايل چئن پوائنٽن جي ڪوآرڊينيٽس جي تعين ذريعي چوراهي واري نقطي ڪوآرڊينيٽ جي پوزيشن جو حساب لڳائي ٿو، ته جيئن ويلڊنگ جو مقصد حاصل ڪري سگهجي.

ليزر سيم ٽريڪنگ سسٽم
ليزر ويلڊنگ سيم ٽريڪنگ سسٽم بنيادي طور تي ليزر سينسر ۽ مانيٽرنگ ٽرمينلز تي مشتمل آهي. ليزر سينسر ويلڊنگ سيم جي معلومات جي فعال حصول ۽ حقيقي وقت جي پروسيسنگ لاءِ استعمال ٿيندو آهي، ۽ صنعتي روبوٽس سان حقيقي وقت جي رابطي کي برقرار رکندو آهي. مانيٽرنگ ٽرمينل سينسرز کي مانيٽر ۽ ترتيب ڏيندو آهي. سسٽم ۾ ذهين ويلڊنگ جي ضرورتن کي پورو ڪرڻ لاءِ ويلڊنگ کان اڳ ڳولڻ، ٽريڪنگ ۽ اسڪيننگ جا ڪم پڻ آهن.
ڪم ڪرڻ جو اصول: ويلڊ سيم اسڪيننگ، پوائنٽ ڪلائوڊ تصوير جي فٽنگ، الگورتھم صحيح طور تي فيچر پوائنٽس جي سڃاڻپ ڪري ٿو، ۽ حساب ڪتاب جي نتيجن جو حقيقي وقت ڊيٽا روبوٽ ڏانهن موڪليو ويو، ڪنٽرول هدايتن ۾، روبوٽ آپريشن کي تبديل يا رهنمائي ڪري ٿو.
ناريل پليٽ حل

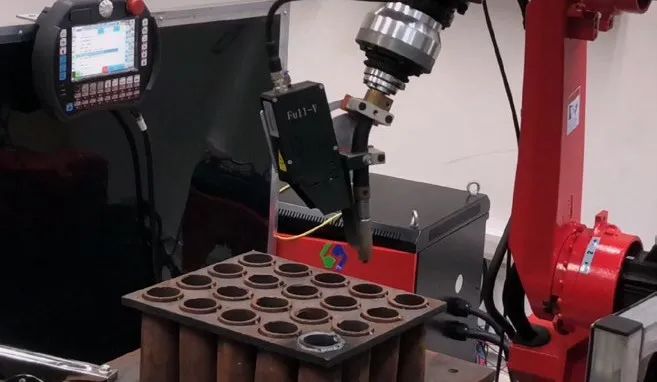
گول سوراخ خودڪار پلگ ويلڊنگ حل

گول سيون حل

ٽيوب پليٽ حل
يونها انٽيليجنٽ تيز رفتاري، محفوظ ۽ ڪارآمد آٽوميشن حل ۽ ريئل ٽائيم سسٽم حل فراهم ڪري سگهي ٿو. ليزر ويزن ويلڊنگ سيم ٽريڪنگ سسٽم ويلڊنگ روبوٽ کي ريئل ٽائيم ويلڊنگ سيم جي جڳھ ۽ ٽريڪنگ کي محسوس ڪرڻ جي قابل بڻائي ٿو، ۽ ويلڊنگ جي عمل ۾ ويلڊنگ سيم آفسيٽ جي مطابق ويلڊنگ جي رفتار کي درست ڪري ٿو، ته جيئن حقيقي ذهين ويلڊنگ کي محسوس ڪري سگهجي.
پوسٽ جو وقت: اپريل-09-2022



